산림청 국립산림과학원(원장 김용관)は、人工知能(AI)を活用した自律走行林業用ロボットを開発し、現場での適用性向上に向けた研究を進めていると6日に明らかにしました。
今回の技術は「林業分野の災害・災難の解決型研究開発事業」の一環として開発されました。GNSS(全球測位システム)とINS(慣性航法システム)を組み合わせた統合航法システムを基にした自律走行林業用ロボットにAIベースのディープラーニング技術を追加適用しました。
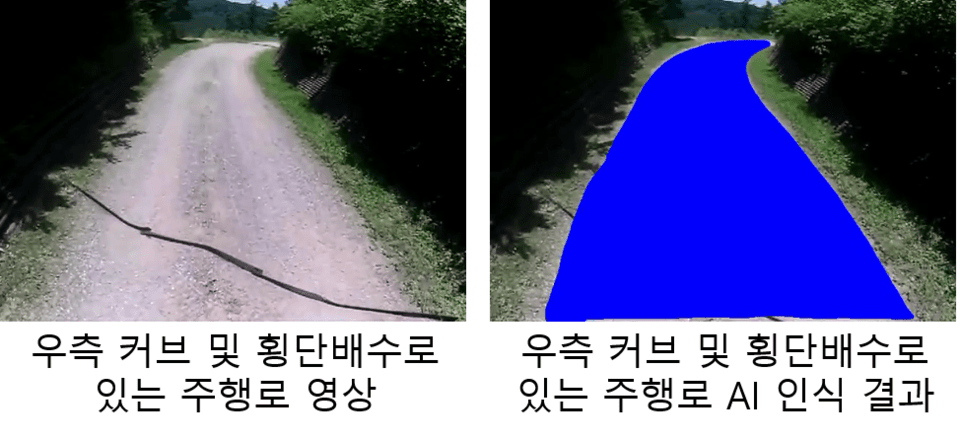
ディープラーニング技術はビジョンセンサーで収集した走行路の映像情報を学習し、自律走行中に発生し得る位置誤差を補正する方式です。これにより、森林環境でも自律的に走行路を認識し、経路の中心線を抽出し、実際の走行が可能であることを現場試験で確認しました。
今回開発されたAI技術はロボットに直接搭載され作動する構造で、別途のネットワークやクラウド接続なしで独立して運営されます。これにより、森林作業の現場にあるロボットと機械装備にも安定的に適用することができます。

オ・ジェホン国立山林科学院の山林技術管理研究所博士は、「搭載型AIベース自律走行技術は無人型山林作業用ロボットはもとより既存の林業用機械にも活用可能だ」とし、「今後、センサー融合技術とともに山林作業の安全性と効率性を高めることに寄与するだろう」と述べました。